Mini Robot Arm 4 Axis 3kgs Brazo robótico de paletización con sistemas de controlador de robot CNC con servomotor y controlador
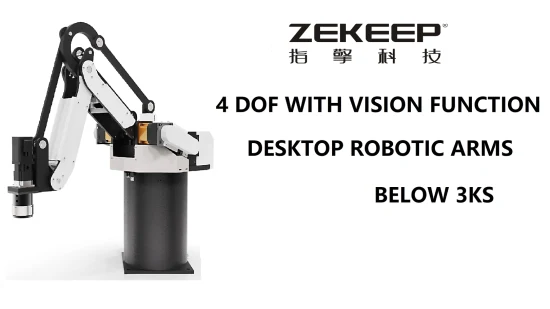
INDUSTRIA ESCRITORIO BRAZO ROBÓTICO Híbrido Servo Motor 4 EJES Soporte desarrollo por segunda vez ARTÍCULO NO. ZKBOT-4
Descripción
Información básica
| N º de Modelo. | ZKBOT-4086 |
| dof | 4 ejes |
| Paquete de transporte | Envío |
| Especificación | 180*180mm 0.2CBM |
| Marca comercial | JABÓN |
| Origen | Porcelana |
| Código hs | 8501109190 |
| Capacidad de producción | 1000 PCS / Años |
Descripción del Producto
BRAZO ROBÓTICO DE ESCRITORIO PARA LA INDUSTRIAServomotor híbrido 4 AXIS Admite desarrollo por segunda vez ARTÍCULO NO. ZKBOT-4086
Nuestro brazo robótico industrial
En la actualidad, la producción principal de nuestra empresa se carga por debajo de 5 kg de brazo robótico de 3 y 4 ejes. Es ampliamente utilizado principalmente en el procesamiento de metales, manipulación industrial de piezas pequeñas, pulverización, industria médica, industria de alimentos y bebidas, productos electrónicos de consumo.
Sobre nosotros
ZEKEEP (Tecnología Foshan Zekeep) se estableció en 2015 en Foshan China facilitando el desarrollo y la actualización de los brazos robóticos industriales en China y desarrollando continuamente amplias aplicaciones en este campo. Desde 2015, la compañía comenzó a centrarse en la investigación y el desarrollo de brazos robóticos económicos inteligentes para pequeñas industrias, brazos robóticos educativos.

| Parámetros de trabajo del robot | |
| Modelo: ZKBOT-4086 | DOF: 4 ejes |
| Carga útil: 3KGS | Precisión de posición repetida: ± 0,1 MM |
| Alcance máximo: 710MM | Temperatura de trabajo: -10°~50° |
| Voltaje de suministro: AC220V/110V | Potencia: Máx. 150W |
| Lugar geométrico de movimiento: punto a punto/punto a línea/línea a línea | sistema de coordenadas: Sistema de coordenadas conjuntas/ sistema de coordenadas mundial |
| E/S: entrada 10 / salida 8 | Consumo de energía: 50W |
| Motor: 42 servomotor híbrido | Control: aplicación móvil/Control remoto/caja de Control |
| Entorno aplicado: Evite el contacto con gases y líquidos inflamables, explosivos o corrosivos. Mantener alejado de fuentes de ruido electrónico (plasma) | |
| Parámetros de trabajo del EJE | |||
| J1 | 140°/segundo | ||
| Máxima velocidad: | J2 | 120°/segundo | |
| J 3 | 100°/segundo | ||
| J4 | 160°/segundo | ||
| J1 | -162°-162° | ||
| Rango operativo máximo: | J2 | -115°-0° | |
| J 3 | -115°-° | ||
| J4 | -162°-162° | ||
| Parámetros básicos del robot | |
| Material: aleación de aluminio | Tamaño de la base: 180 mm * 180 mm |
| Peso neto (kilogramos): 5,2 kg | Peso bruto (kg): 9 kg |
| Tamaño de la caja de control: (L) 260 mm * (W) 160 mm * (H) 260 mm | |
| Embalaje: (L) 490 mm * (W) 320 mm * (H) 380 mm | |
| PARÁMETROS DEL MOTOR PASO A PASO | |
| Par de retención: 0,4 N*M | Tensión nominal: 24V |
| Corriente nominal: 1.7A | Ángulo de paso: 1,8 ° |
| Número de fase: dos fases de cuatro hilos | |
| PARÁMETROS DEL REDUCTOR | |
| Relación de reducción: 1:10 | Par de salida máximo: 5N*M |
| Velocidad de entrada nominal: 3000 | |
| PARÁMETRO DE LA PANTALLA TÁCTIL | |||
| Tamaño de cristal líquido | TFT de 7 pulgadas | Dimensión límite | 148*96*37MM |
| Relación de resolución | 480*272 | Tamaño de apertura de montaje | 139*86MM |
| Pantalla táctil | Red de resistencia de precisión de 4 hilos | Rango de entrada | DC15V-28V/Nominal 24 v |
| UPC | A8 800 MHz | Descarga del programa | Interfaz USB ESCLAVO B |
| Almacenamiento | 128M | Puerto de comunicación | 232,422/485 |




R: Sí, ofrecemos una garantía de un año para nuestros productos. P2: ¿Cuál es su tiempo de entrega?
R: normalmente, son unos 15 días hábiles. Si tenemos robots en stock, podemos enviarlos de inmediato.
P3: ¿Puede proporcionar un documento técnico?
R: Sí. hacemos. Y está en inglés. P4: ¿Qué idioma admite su sistema?
R: La interfaz de usuario está en inglés. P5: ¿Cómo resolver los problemas al usar el producto?
R: Brindamos soporte en línea gratuito, si no se soluciona, regresará a la fábrica para su mantenimiento.
Nuestro contacto
Enviar ahora